DiscoverAir
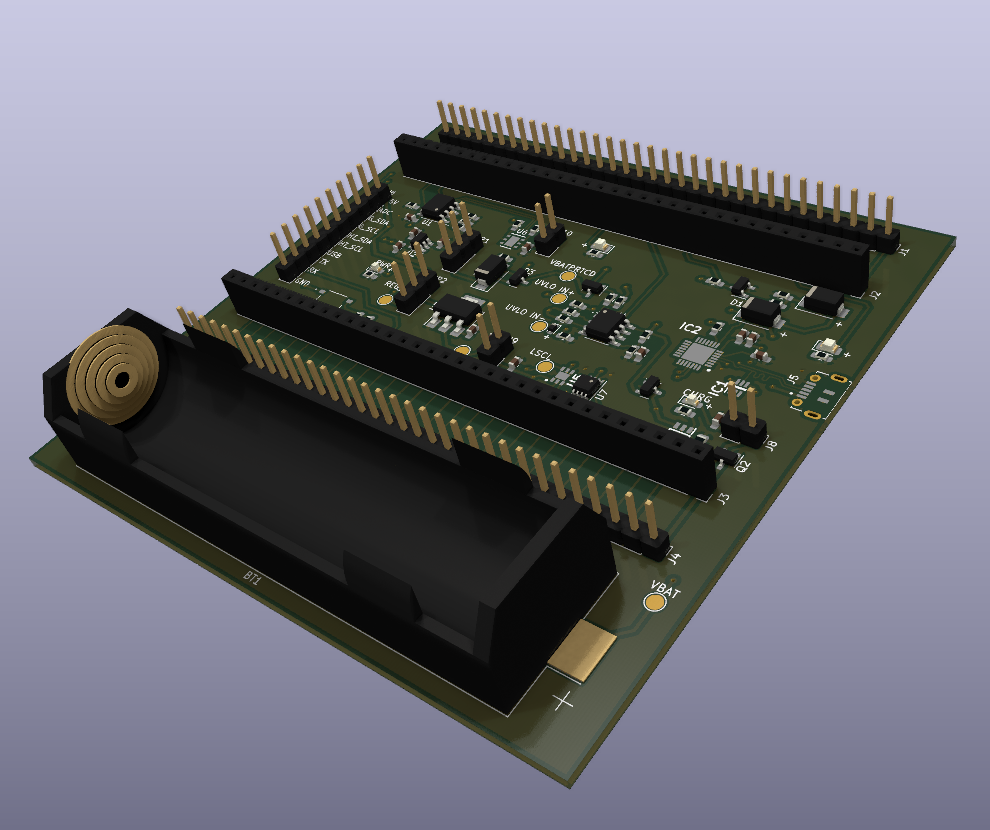
An Air Quality Monitoring Hat for the STM32F051 Discovery Board. The board is equipped with two sensors, one for gas sensing and one hybrid humidity/temperature sensor. Additionally, the board is capable of being powered by a Li-Ion battery, and is equipped with a battery charger as well as various protection circuitry for both the battery and the circuit.
STMKiCadC/C++Circuit DesignFirmware Design